
Mit dieser Technologie werden wahllos liegende Bauteile in Behältern oder auf Förderbändern mithilfe 3D-basierter Sensorsysteme erkannt. Wir sprechen hier vom klassischen Bin-Picking-System. Dabei ist das Zusammenspiel zwischen Roboterbahnplanung, Greifertechnologie, Kollisionskontrolle und Sensorsystem von maßgeblicher Bedeutung.
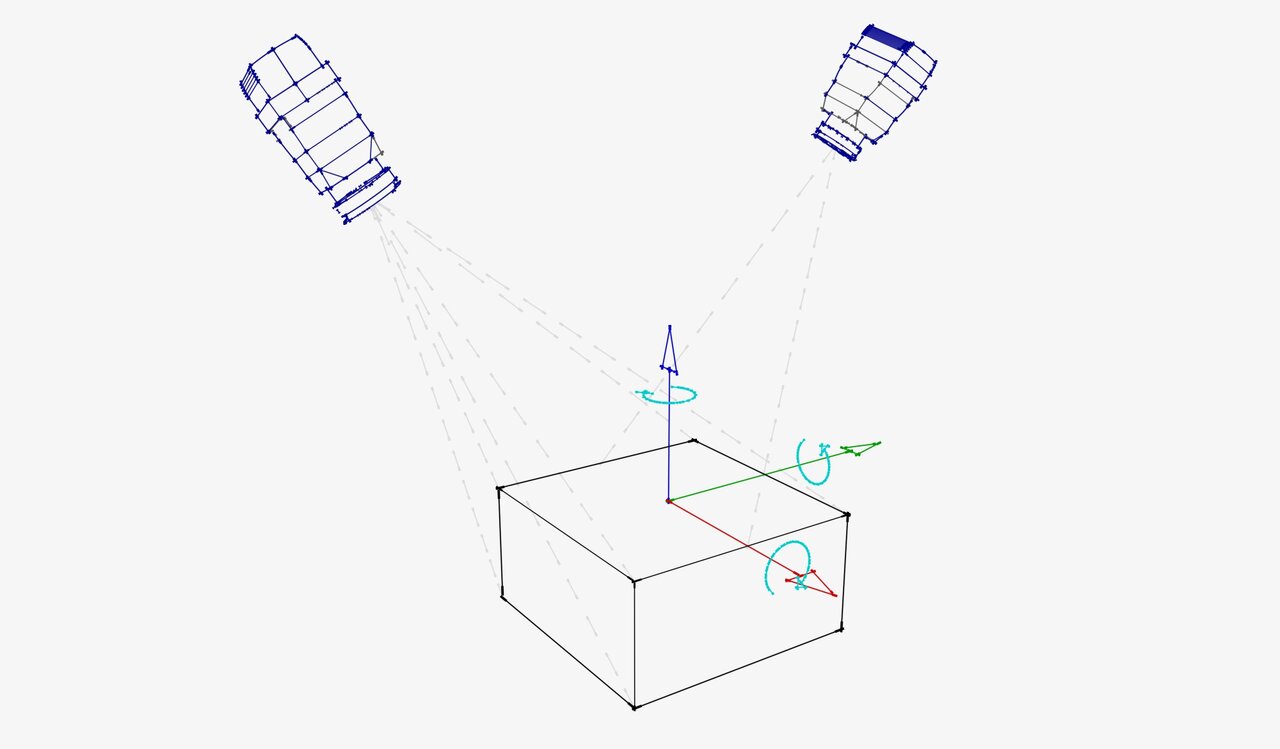
3D-Erkennung x, y, z und Rotation Rx, Ry, Rz
Aufgabenstellung:
Automatisches Entleeren von Behältern oder Paletten mit wahlloser Teilelage. Der klassische „Griff in die Kiste“.
In den meisten Anwendungsfällen ist der Sensor stationär montiert und benötigt für einen kurzen Zeitraum freie Sicht in den Behälter.
Bei mehreren Behältern kommt ein pneumatisches oder elektrisches Verfahrsystem zum Einsatz, das maximale Effektivität gewährleistet.
Nach der Bildaufnahme wird die Punktewolke mit dem „Best Shape“-Verfahren ausgewertet. Hier kommen langjährig erprobte Systeme zum Einsatz, die auf die jeweiligen Bauteilformen spezialisiert sind.
Die FX-Serienmodule sind universell einsetzbar. Speziell für Ringe, Rollen oder Getriebeteile sind standardisierte Lösungen vorhanden.

Die entsprechenden Greifer werden von unseren Spezialisten für Ihre Bauteile konzipiert und konstruiert. Je nach Anwendung können Sie zwischen magnetischen Greifern, Fingergreifern oder Vakuumgreifern wählen.

In unserem Technikum testen wir, welches System für Sie am besten geeignet ist. Senden Sie uns Ihre Bauteile im Originalbehälter zu, unsere Applikationsabteilung erstellt einen umfangreichen Testbericht mit Auswertung und dem Vorschlag für ein Greifsystem. Dabei steht das Verhalten der Bauteile hinsichtlich Erkennungsgrad, Greifbarkeit und voraussichtlichem Entleerungsverhalten im Fokus.
Ein speziell ausgewählter 3D-Sensor erfasst die Oberfläche der Bauteile und kann somit passgenau bestimmen, welche Bauteile in Greifposition liegen. In diesem Fall des Magnetgreifers werden die Werkstücke entnommen und auf einem Shuttle abgelegt, das die Bauteile nach außen befördert und gleichzeitig entmagnetisiert.
