
零件探测——混乱的空间布局
视觉技术– 3D,随机
此技术通过基于3D的传感系统方法来识别容器或料带上混乱放置的零件。从本质上来说,这是一个经典的料仓拣选系统。机器人路线规划、机械手技术、防撞控制和传感系统之间的互动在此处是至关重要。
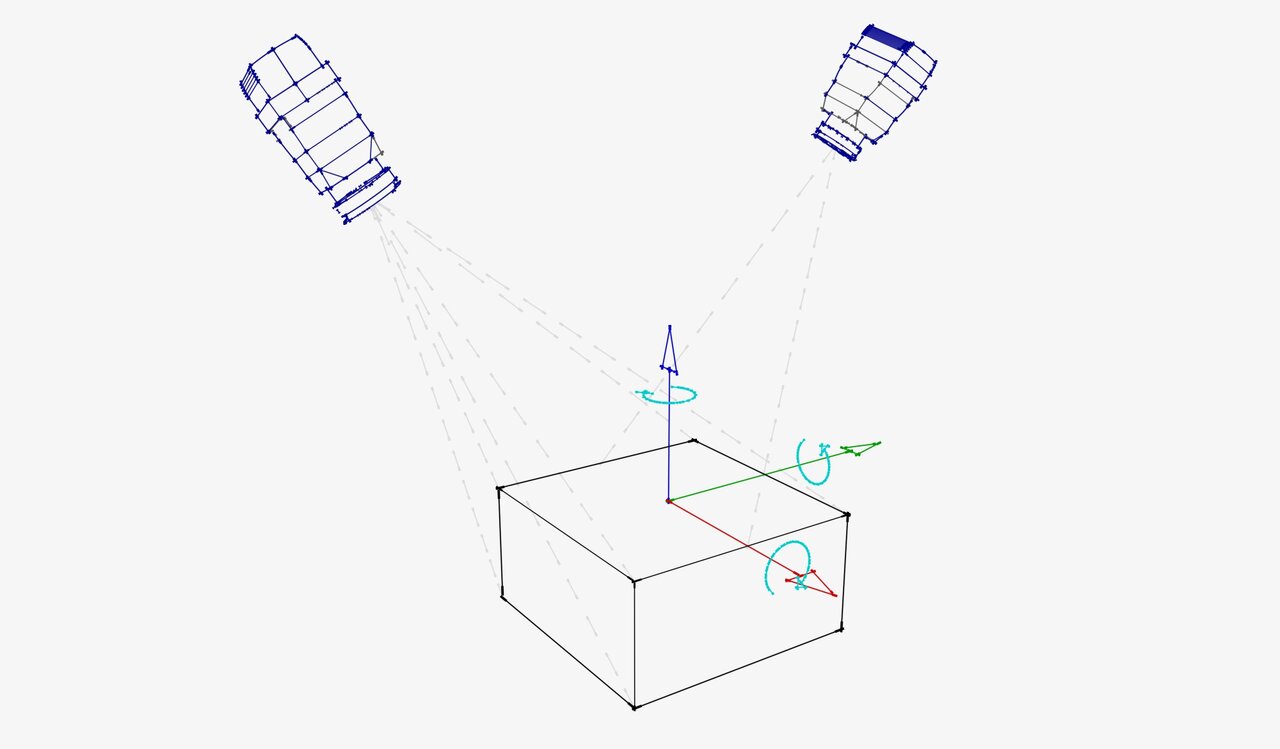
3D-识别 x, y, z 和转速Rx, Ry, Rz
难点:
自动清空装有无序布局工件的容器或托盘。经典的“盲盒拣选“。
在大多数案例中,传感器安装在一个固定位置,并且仅需简单无障碍地查看容器即可。
采用一个气动或电动系统来实现多容器应用中的最大效率。
获取图像后,通过“最佳形状“对点云进行评估。此过程采用了专门处理各个零件形状的经久耐用的系统。
FX系列模块具有通用性。可以选择专用于环、滚柱或者齿轮件的标准化解决方案。

我们的专家针对您的零件进行设计并建造相应的机械手。你可以根据应用选择磁吸式、抓手式,或者真空式机械手。

我们会在实验室中测试哪个系统最适合您。将您放在原始容器中的零件发给我们,以便于我们的应用部门能生成一个综合测试评估报告并为您推荐一个机械手系统。与可识别性、可抓握性相关的零件行为和预期清空行为是这里比较重要的方面。
一个特选的3D传感器探测零件表面并能由此确定后续要抓取的零件。磁吸机械手将工件取出并放到一个穿梭滑台,滑台释放零件并同时将他们消磁。
我们的产品
