
零件识别– 有序的空间布局
视觉技术 – 3D,笛卡尔坐标系
此项技术基于3D,完美适用于不同高度和大部分堆叠放置物体的识别。我们采用尺寸为400 x 600 mm、600 x 800 mm ,乃至1,000 x 1,200 mm的容器。无论是钢丝料篮、带或不带托盘的所料盒、还是带有堆叠框或网箱的托盘:对于任何一种容器,我们都有适合的解决方案。
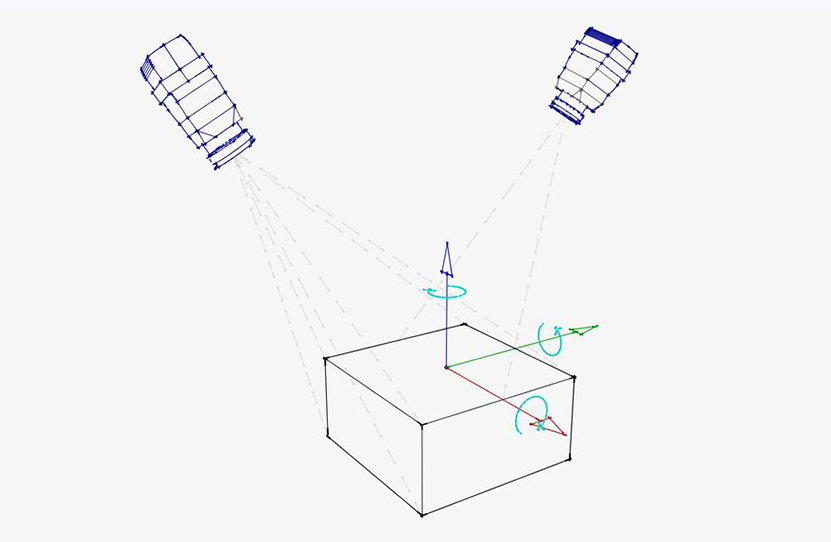
3D-识别 x, y, z 和 转速Rz
难点:从一个容器中的不同高度,和相对有序和稍有倾斜的位置抓取零件。
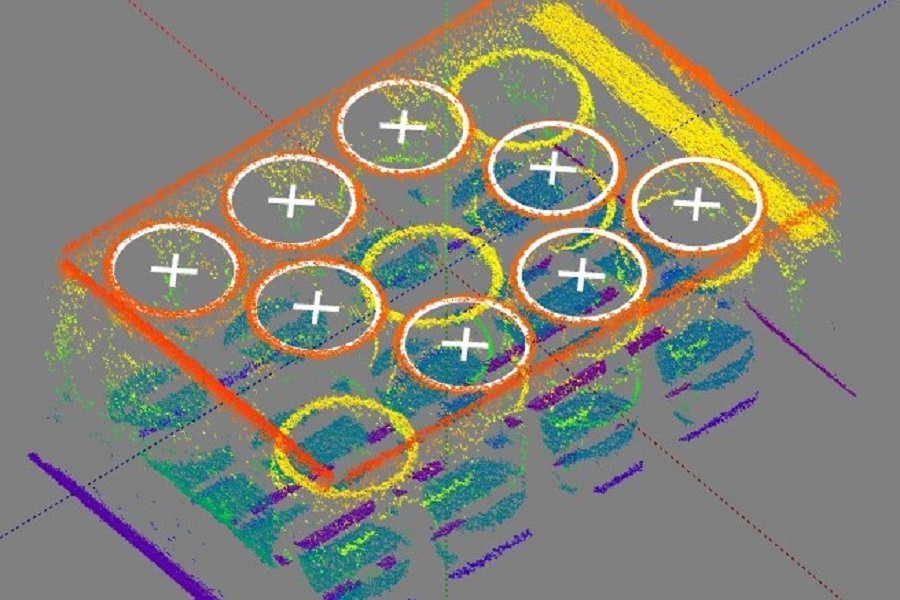
利用传感系统方法记录点云的一项技术来提供零件的必要位置信息。完整的3D映射也会将所有工作区间的尺寸考虑在内。
根据应用的要求,将传感系统固定或安装在机器人抓手上。由此实现了零件位置识别应用的稳定可靠设置,从而保证了制造或装配的最重大生产力。
大多数案例都是采用一台单独的个人电脑对点云进行评估。
带有抓手的设计流程能与应用要求的精度和最大的机器人应用灵活性实现完美适配。

我们采用的是来自顶级3D摄像技术制造商的经久耐用的传感器,这些传感器仍在被持续改进。
该系统被应用在各种广泛的案例中——从定制非标方案到我们经得起考验的FX系列模块。
我们的产品
