This technology is used to recognize disarrayed components in containers or on conveyor belts by means of 3D-based sensor systems. Essentially, this is the classic bin picking system. The interaction between robot path planning, gripper technology, collision control, and sensor system is of paramount importance here.
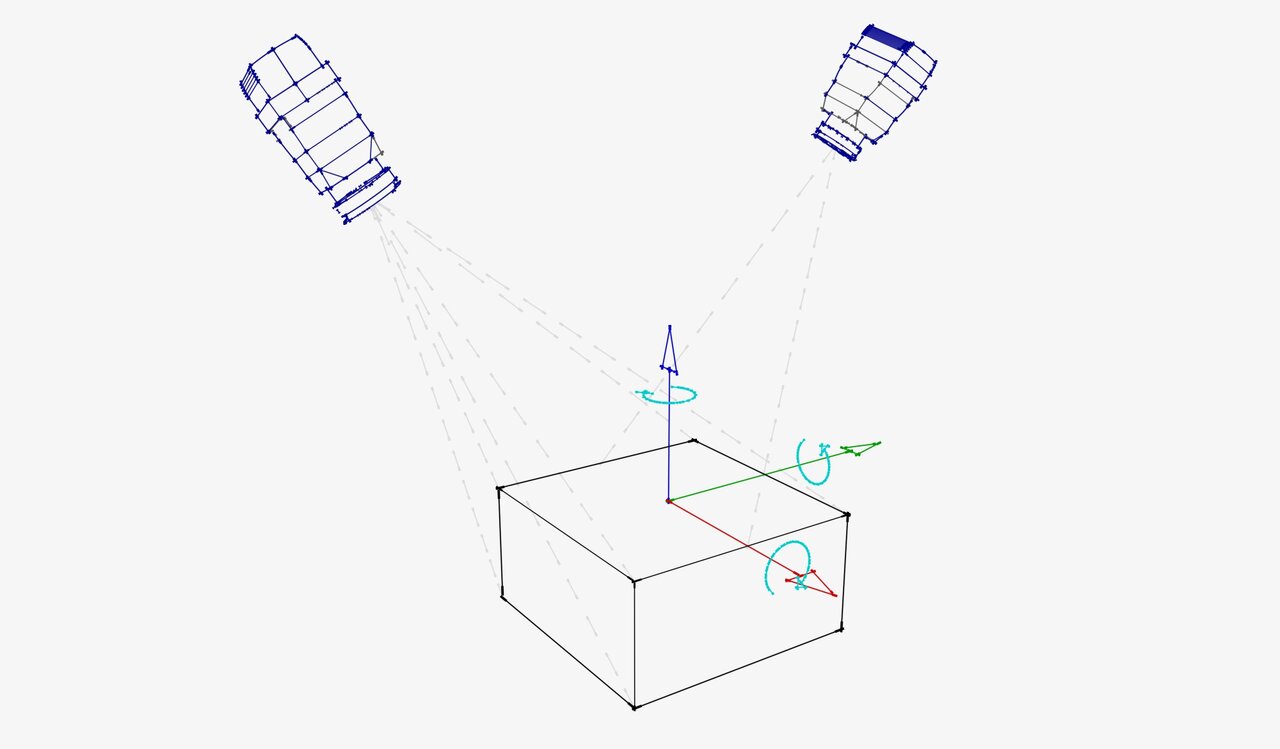
3D recognition x, y, z and rotation Rx, Ry, Rz
The challenge:
Automatic emptying of containers or pallets with random arrangement of parts. The classic “blind picking from the box.”
In most cases, the sensor is mounted in a fixed position and only needs a brief unobstructed view of the container.
For maximum efficiency in the case of multiple containers, a pneumatic or electrical movement system is used.
After the image is taken, the cloud of dots is evaluated using the “best shape” process. This process uses tried-and-tested systems that specialize in the respective component shapes.
The FX series modules can be used universally. Standardized solutions are available especially for rings, rollers, or gear parts.

Our specialists design and build the corresponding grippers for your components. Depending on the application, you can select between magnetic, finger, or vacuum grippers.

We test which system is best for you at our lab. Send us your components in the original container so that our application department can create a comprehensive test report with an evaluation and suggest a gripper system. The component behavior in terms of recognizability, grippability, and the expected emptying behavior is what matters here.
A specially selected 3D sensor detects the surface of the components and can therefore precisely determine which components are ready to grip. With the magnetic gripper, the workpieces are removed and placed on a shuttle, which discharges the components and demagnetizes them at the same time.